Robotic Rehabilitation of Patients Affected by Stroke
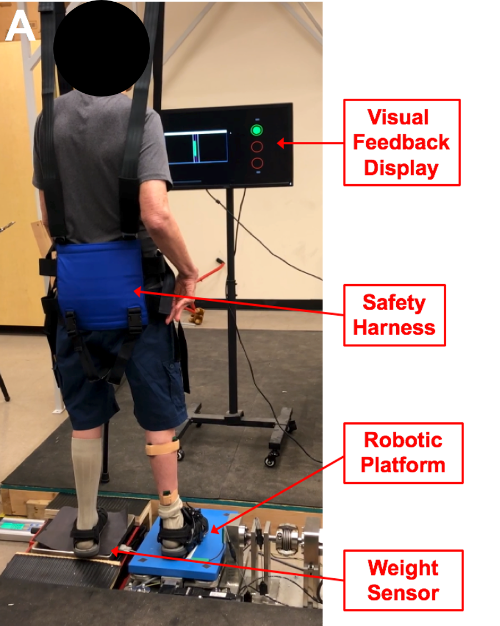
As described here, the study demonstrated the feasibility of a 6-week, visuomotor ankle training program using a stiffness-controlled, 2 degrees-of-freedom robotic platform and investigated its effectiveness on paretic ankle motor control and lower extremity function in patients with stroke. While standing on a compliant robotic platform that simulated rotational stiffness comparable to the ankle joint stiffness of unimpaired individuals, subjects performed visually-guided target reaching ankle movement tasks in the sagittal and frontal planes. Both participants successfully completed the 6-week training without any discomfort or safety issues. The proposed training contributed to the significant improvement of paretic ankle motor control, observable by less variable, smoother, and faster ankle movements, and led to a functional improvement in postural balance and walking, evidenced by improved Berg Balance Scale and 10 Meter Walk Test scores, respectively.
The project entailed development of suitable haptic controllers for visuomotor training of the ankle and the setup including realtime feedback.